knowledge
การเลือก Motor และ Gear อย่างถูกต้อง เพื่อลด Downtime ในโรงงานอุตสาหกรรม

มี.ค.
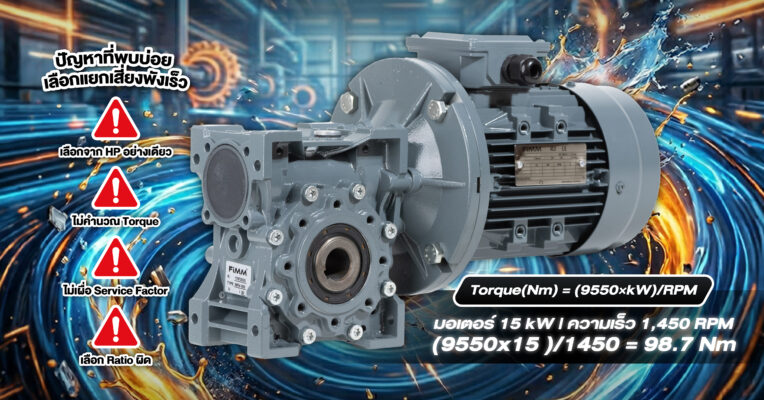
ในระบบส่งกำลังอุตสาหกรรม (Industrial Drive System) มอเตอร์ไฟฟ้า (Induction Motor) และเกียร์ทดรอบ (Gear Reducer) ทำงานร่วมกันตลอด 8–24 ชั่วโมงต่อวัน หลายโรงงานเลือกมอเตอร์ก่อนตามกำลัง (kW หรือ HP) แล้วจึงเลือกเกียร์จากอัตราทดที่ใกล้เคียง หรือเลือกจากสินค้าที่มีในสต๊อก วิธีนี้อาจสะดวกในระยะสั้น แต่ในเชิงวิศวกรรมแล้ว การเลือก Motor และ Gear แยกกันโดยไม่คำนวณร่วมกัน อาจเป็นสาเหตุให้ระบบพังเร็วโดยไม่รู้ตัว
ผลลัพธ์ที่พบบ่อย ได้แก่ ความร้อนสะสมเกินพิกัด แบริ่งสึกหรอเร็ว น้ำมันเกียร์เสื่อมสภาพ กระแสไฟฟ้าสูงผิดปกติ และ Downtime ที่ทำให้สายการผลิตหยุดโดยไม่คาดคิด
หัวใจสำคัญคือ: Motor และ Gear ต้องถูกคำนวณและออกแบบให้สัมพันธ์กันตั้งแต่ต้น
Torque คืออะไร และทำไมสำคัญกับ Gear Reducer?
Torque (แรงบิด) คือแรงหมุนที่เพลาส่งผ่านไปยังโหลด เกียร์ไม่ได้รับ “แรงม้า” โดยตรง แต่รับ “แรงบิด” จากเพลามอเตอร์ ดังนั้นการเลือก Gear Reducer ที่เหมาะสม ต้องเริ่มจากการคำนวณ Torque อย่างถูกต้อง
สูตรพื้นฐาน:
Torque (Nm) = (9550 × kW) ÷ RPM
ตัวอย่าง:
มอเตอร์ขนาด 15 kW
ความเร็วรอบ 1,450 rpm (4 Pole)
Torque = (9550 × 15) ÷ 1450
≈ 98.7 Nm
นี่คือแรงบิดที่ปลายเพลามอเตอร์ก่อนเข้าสู่เกียร์
หากไม่คำนวณค่า Torque ให้ถูกต้อง อาจเลือกเกียร์ที่รองรับแรงบิดไม่เพียงพอ ทำให้เกียร์ทำงานเกินพิกัดตั้งแต่วันแรกที่ติดตั้ง
Ratio Selection: เลือกอัตราทดให้ตรงกับรอบที่ต้องการ
สมมติในระบบ Conveyor ต้องการความเร็วปลายทาง 50 rpm
อัตราทดคำนวณจาก:
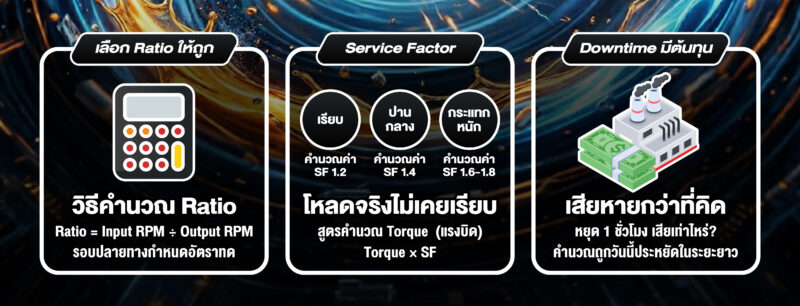
Ratio = Input RPM ÷ Output RPM
1450 ÷ 50 ≈ 29
ดังนั้นควรเลือกเกียร์ที่มี Ratio ประมาณ 30
แรงบิดหลังผ่านเกียร์จะเพิ่มขึ้นตามอัตราทด:
98.7 × 30 ≈ 2,961 Nm
ค่า Torque นี้เป็นค่าทางทฤษฎีก่อนเผื่อความปลอดภัย
Service Factor: ความปลอดภัยที่ไม่ควรมองข้าม
ในสภาพการทำงานจริง โหลดไม่ได้เรียบเสมอไป บางระบบมีแรงกระแทก (Shock Load) การเริ่ม–หยุดถี่ หรือโหลดแปรผัน
จึงต้องเผื่อ Service Factor (SF)
ค่าที่ใช้ทั่วไป:
-
โหลดเรียบ (Smooth Load): SF ≈ 1.2
-
โหลดปานกลาง: SF ≈ 1.4
-
โหลดกระแทกหนัก: SF ≈ 1.6–1.8
หากโหลดเป็นแบบกระแทก และใช้ SF = 1.6
Required Torque = 2,961 × 1.6
≈ 4,737 Nm
ดังนั้นเกียร์ที่เลือกควรรองรับแรงบิดอย่างน้อย 4,737 Nm
หลายโรงงานเลือกเกียร์จากค่า Torque เชิงทฤษฎีเท่านั้น โดยไม่เผื่อ SF ส่งผลให้ระบบพังเร็วกว่าที่ควร
Downtime มีต้นทุนมากกว่าที่คิด
สมมติสายการผลิตหยุด 1 ชั่วโมง:
-
ค่าแรงพนักงาน: 40,000 บาท
-
ค่าเสียโอกาสการผลิต: 100,000 บาท
-
ค่าเร่งซ่อมฉุกเฉิน: 50,000 บาท
รวมประมาณ 190,000 บาทต่อชั่วโมง
เมื่อเทียบกับการลงทุนเลือก Motor + Gear ให้เหมาะสมตั้งแต่ต้น จะเห็นว่าการคำนวณที่ถูกต้องช่วยลดความเสี่ยงทางธุรกิจได้อย่างมีนัยสำคัญ
ทำไมต้องออกแบบ Motor และ Gear เป็นชุดเดียวกัน
Motor เป็นแหล่งพลังงาน
Gear ทำหน้าที่ปรับรอบและเพิ่มแรงบิด
หากทั้งสองไม่สัมพันธ์กัน อาจเกิด:
-
มอเตอร์ทำงานเกินโหลด
-
กระแสไฟฟ้าสูง
-
ความร้อนสะสมในเกียร์
-
แบริ่งสึกหรอเร็ว
-
ระบบ Trip บ่อย
การออกแบบระบบส่งกำลังที่ถูกต้องต้องพิจารณาร่วมกันทั้งกำลัง ความเร็วรอบ ลักษณะโหลด และชั่วโมงการทำงาน
แนวทางการออกแบบระบบส่งกำลังที่เหมาะสม
-
คำนวณ Torque จาก kW และ RPM
-
กำหนดรอบปลายทางที่ต้องการ
-
เลือก Ratio ให้เหมาะสม
-
เผื่อ Service Factor
-
ตรวจสอบ Efficiency ของเกียร์
-
ตรวจสอบการติดตั้งและ Alignment
แนวทางนี้ช่วยให้ระบบทำงานที่จุดออกแบบจริง ลดความร้อนสะสม และยืดอายุการใช้งานของทั้ง Motor และ Gear
บทสรุป
การเลือก Motor และ Gear แยกกันอาจดูสะดวกในระยะสั้น แต่ในเชิงวิศวกรรม ระบบส่งกำลังต้องถูกคำนวณเป็นชุดเดียวกัน
Torque, Ratio และ Service Factor คือสามปัจจัยหลักที่กำหนดความเสถียรของระบบ หากออกแบบถูกต้องตั้งแต่ต้น จะช่วยลด Downtime ลดต้นทุนระยะยาว และเพิ่มประสิทธิภาพของสายการผลิต
FAQ: คำถามที่พบบ่อย
Q1: เลือกมอเตอร์จาก HP อย่างเดียวได้หรือไม่?
ไม่ควร เพราะเกียร์รับแรงบิด (Torque) ไม่ใช่แค่กำลัง HP จำเป็นต้องคำนวณจากรอบและโหลดจริง
Q2: Service Factor สำคัญแค่ไหน?
สำคัญมาก โดยเฉพาะในงานที่มีแรงกระแทกหรือการทำงานต่อเนื่อง
Q3: ควรคำนวณ Torque ทุกครั้งก่อนเลือก Gear หรือไม่?
ควรทุกครั้ง เพื่อป้องกันการเลือกเกียร์ที่รองรับแรงบิดไม่เพียงพอ
ต้องการให้ทีมช่วยวิเคราะห์ก่อนสั่งซื้อ?
ส่งข้อมูล kW, RPM, ลักษณะโหลด และชั่วโมงการทำงานมาให้ทีมวิศวกรของ Vanich Group เราพร้อมช่วยเลือก Motor และ Gear ที่เหมาะสมกับงานของคุณ เพื่อให้ระบบเสถียรในระยะยาว